Solar Tracking System








Solar Tracking System
Main technical parameters
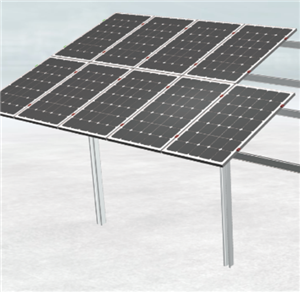
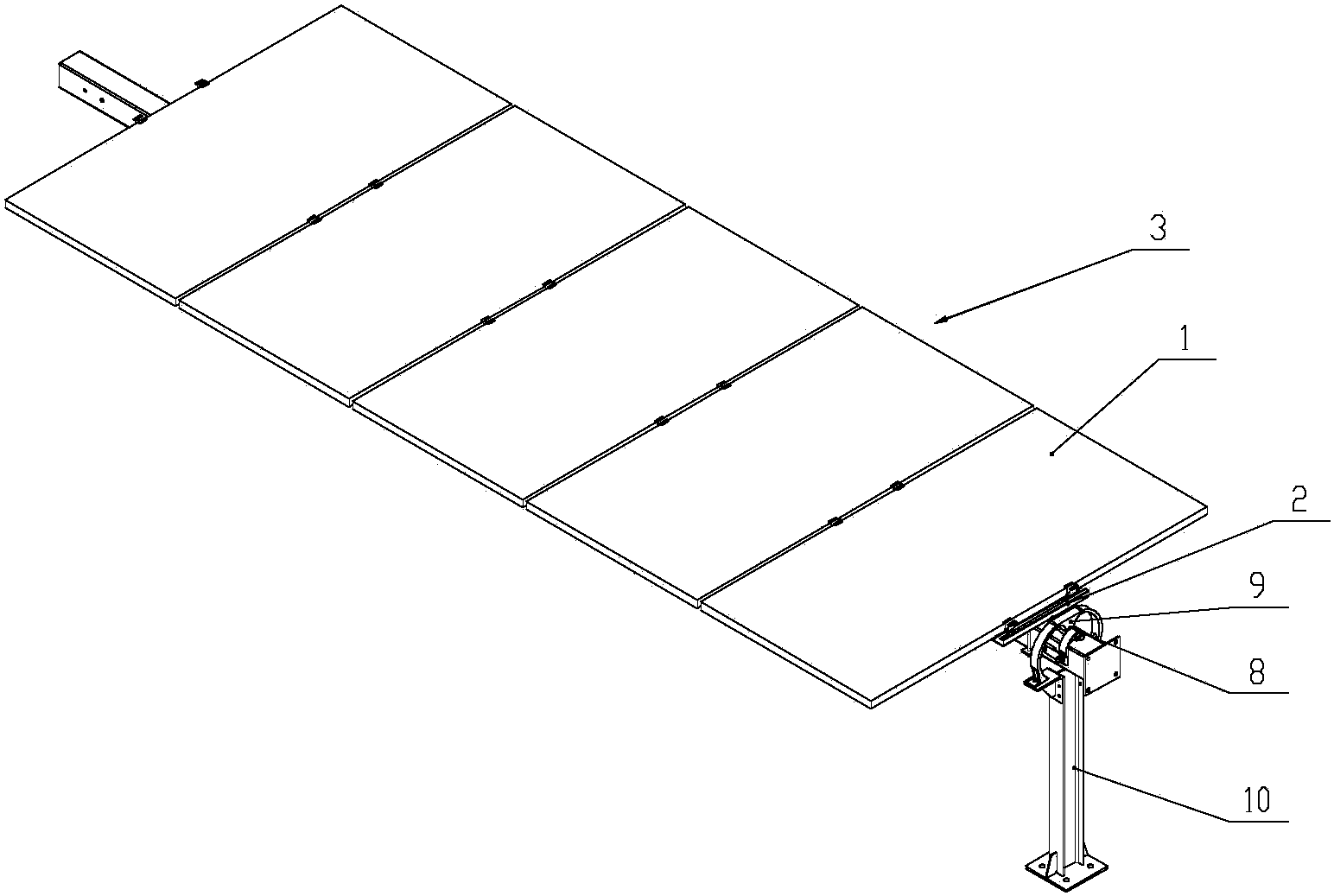
1. Tracking form: single-row independent tracking system
2. tracking Angle range: ±60°
3. driving device: rotary drive, 28V DC motor
4. North-south total length limit of tracker: ≤105m
5. System voltage: 1000 V or 1500 V
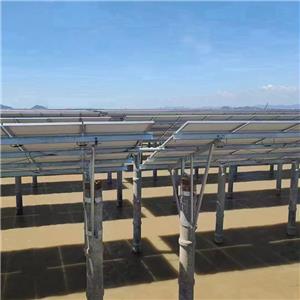
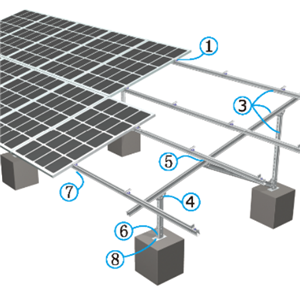
6. the material used: Q235B/Q355B hot dip zinc steel
7. Land utilization rate (GCR) : ≥ 25%
8. Pile foundation form: hammer pile/cast-in-place pile/cement foundation
9. Structural material: hot dip galvanized/pre-galvanized/magnesium aluminum zinc plated steel
10. power supply mode: group series self-power supply, lithium battery reserve
11. System daily power consumption: 0.02kWh/day
12. wind resistance design: 105mph (47m/s) (ASCE7-10), according to the project wind speed design
13. Component type: Compatible with all components
14. working environment temperature: -20℃ to 60℃ (-30℃ to 60℃ optional)
Control system parameters:
1. Control system: Each set of tracker is equipped with a control box
2. Control mode: astronomical algorithm + position sensor closed-loop control +AI algorithm
3. tracking accuracy: ≤ 2°
4. Dc group series power supply scheme: Yes
5. Reverse tracking: Yes
6. Communication design: LoRa wireless communication or RS485
7. Night return mode: Yes
8. Flood mode: Optional
9. Snow mode: Optional
10. Gale protection mode: Yes
Electronic control system parameter
1. Control algorithm Astronomical algorithm + position sensor closed-loop control
2. Tracking accuracy ≤ 2°
3. Inverse tracking supports terrain adaptation intelligent algorithm
4. communication design LoRa wireless communication or RS485
5. Other special modes night return mode, heavy snow mode and hail mode
6. The default power supply group of the controller is series power supply, and AC power and small panel are used as required
7. Flood mode leveling tracker (optional)
8. Maximum inclination Angle of snow mode tracker (optional)
9. wind load mode flat tracker